 STECHOQ TRAINING CENTER
STECHOQ TRAINING CENTER
DAY 6 : Pengenalan arm robot
A. Deskripsi arm robot
Dari manufaktur, otomotif hingga pertanian, industrial arm robot adalah salah satu jenis robot yang paling umum digunakan saat ini.
Arm robot, juga dikenal sebagai lengan robot artikulasi, cepat, andal, dan akurat serta dapat diprogram untuk melakukan tugas dalam jumlah tak terbatas di berbagai lingkungan. Mereka digunakan di pabrik untuk mengotomatisasi pelaksanaan tugas yang berulang, seperti menerapkan cat ke peralatan atau suku cadang; di gudang untuk mengambil, memilih, atau menyortir barang dari konveyor distribusi untuk memenuhi pesanan konsumen; atau di ladang pertanian untuk memetik dan meletakkan buah-buahan matang di atas nampan penyimpanan. Dan ketika teknologi robot berkembang dan lingkungan industri menjadi lebih terhubung, kemampuan lengan robot berkembang untuk memungkinkan kasus penggunaan baru dan model operasi bisnis.
Di masa lalu, arm robot membutuhkan proses teaching untuk melakukan tugas-tugas yang didefinisikan secara khusus, seperti memilih satu jenis objek dari lokasi yang tepat dengan orientasi tertentu. Robot tidak dapat mengidentifikasi jenis objek tertentu pada sampel acak, menentukan lokasi objek dengan beberapa toleransi (area daripada posisi yang tepat), atau menyesuaikan genggaman berdasarkan orientasi objek.
Saat ini, berkat perangkat seperti kamera kedalaman resolusi tinggi Intel® RealSense™, CPU dan GPU yang andal, dan teknologi AI seperti Intel® Distribution of OpenVINO™ toolkit, arm robot ditambah dengan penginderaan dan kecerdasan untuk melakukan tugas baru. Robot cerdas yang dilengkapi dengan penglihatan ini dapat mendeteksi objek di sekitarnya, mengenalinya berdasarkan jenisnya, dan memanipulasinya sesuai dengan itu. Kemampuan ini memungkinkan robot untuk beroperasi lebih akurat dan lebih konsisten, serta lebih aman dan lebih cepat dari sebelumnya. Hal itu juga memperluas jangkauan tugas yang dapat diselesaikan robot.
Dengan kemajuan dalam visi mesin, AI, dan teknologi jaringan, lengan robot sekarang dapat melihat, menganalisis, dan merespons lingkungan mereka sambil mentransmisikan data dan wawasan berharga kembali ke fasilitas dan sistem manajemen bisnis. Salah satu area yang diuntungkan dari transformasi ini adalah pemeliharaan peralatan (termasuk robot). Robot dapat menghitung data di node atau mengirimkannya ke server atau cloud untuk pemantauan jarak jauh. Proses ini memungkinkan perawatan prediktif, yang pada gilirannya membantu mengurangi biaya perawatan sekaligus meningkatkan waktu kerja alat berat.
B. Cara kerja arm robot
Cara kerja robot ini sangat mirip dengan cara kerja lengan manusia. Arm robot memang didesain secara mekanikal mirip dengan bentuk lengan manusia, hal ini bertujuan agar robot dapat bergerak, menggenggam, memindahkan objek layaknya tangan manusia. Arm robot biasanya terdiri dari enam axis yang menghubungkan lengan-lengan logam dengan motor sebagai penggerak. Enam sendi pada Arm robot sangat mirip dengan lengan manusia, namun karena jumlah sendi lebih banyak sehingga mampu menjangkau sela-sela sempit atau kita kenal dengan kemampuan menjangkau derajat kebebasan (degree of fredom).
Arm robot juga memiliki sensor tekanan bawaan yang memberi informasi komputer seberapa keras robot mencengkeram objek tertentu. Tujuan adanya sensor untuk menjaga robot agar tidak menjatuhkan atau menghancurkan apa pun yang dibawanya. Selain tools dalam bentuk telapak tangan, terdapat berbagai macam tools umum termasuk bor, las, dan cat semprot.
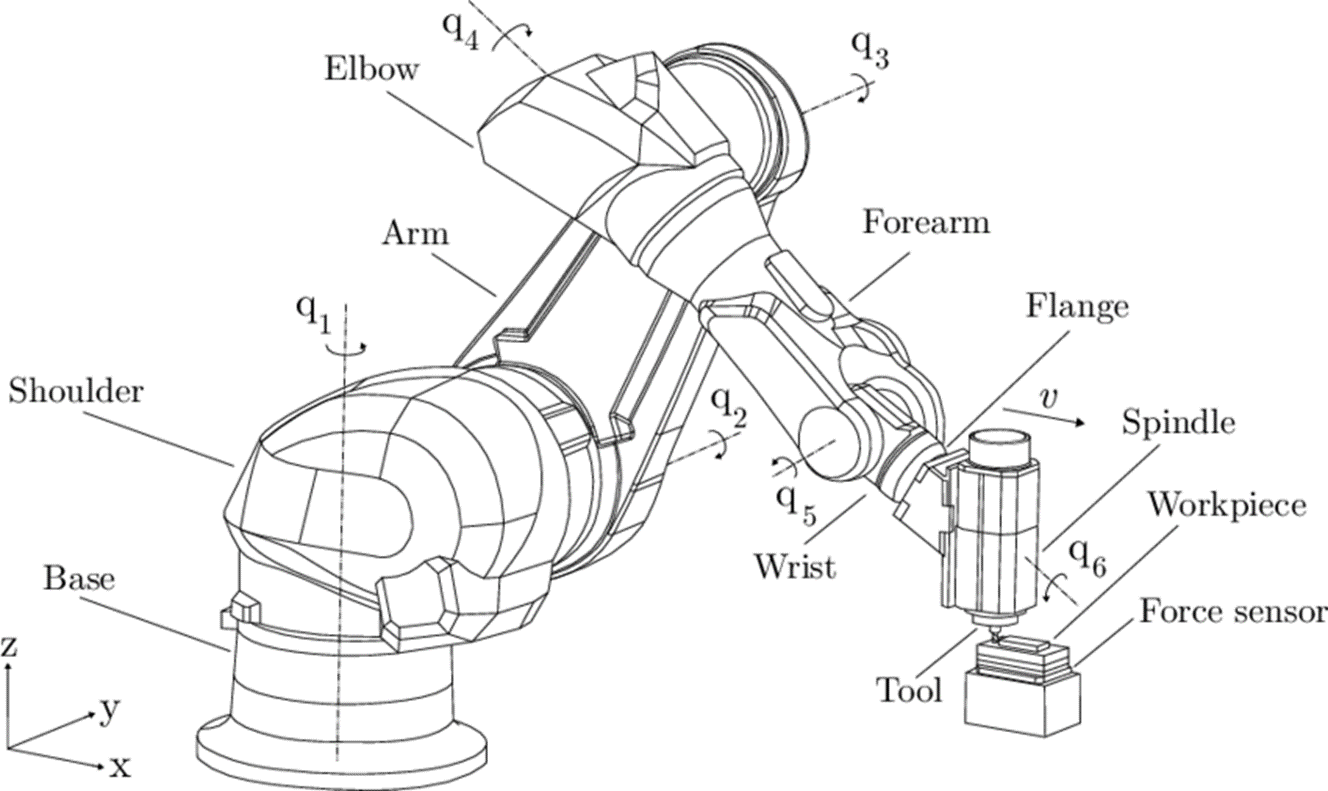
Walaupun memiliki jumlah joint yang sama, setiap arm robot memiliki desain mekanik yang berbeda sehingga bisa saja terdapat beberapa arah gerakan dan jarak jangkauan yang berbeda. Untuk dapat lebih memahami perbedaan tersebut berikut gambaran dan gerakan arm robot omron dan mitsubishi :
kedua arm robot berikut memiliki jumlah joint yang sama(6 joint), namun ada sedikit perbedaan diantara keduanya.
Joint 1(J1)
J1 adalah joint yang terdapat pada base robot, joint ini berfungsi menggerakan robot pada rotasi basenya sehingga seluruh bagian robot yang lain ikut bergerak.


Joint 2(J2)
J2 adalah joint yang terdapat pada bagian shoulder robot, joint ini berfungsi menggerakan robot dengan bertumpu pada base sehingga bagian robot dari shoulder hingga hand/tool dapat bergerak.


Joint 3(J3)
J3 adalah joint yang terletak pada bagian ujung arm (elbow), joint ini berfungsi menggerakan robot dengan bertumpu pada arm yang terhubung dengan shoulder sehingga bagian robot dari elbow hingga hand/tool dapat bergerak.


Joint 4(J4)
J4 adalah joint yang terletak pada bagian forearm robot, joint ini berfungsi menggerakan robot dengan berotasi terhadap elbow sehingga bagian robot dari forearm hingga hand/tool dapat bergerak.


Joint 5(J5)
J5 adalah joint yang terletak pada bagian wrist robot, joint ini berfungsi menggerakan robot sehingga bagian hand/tool robot dapat berotasi terhadap ujung lengan bawah robot.


Joint 6(J6)
J6 adalah joint yang terletak pada bagian ujung dari robot, joint ini berfungsi untuk menghubungkan antara bagian robot dengan tool yang akan dipakai. Bagian ini bisa dihubungkan dengan banyak macam gripper dan alat pencengkram lainnya sesuai dengan kebutuhan pemakaian robot.

Hand
End effector, atau tangan robot(Hand), dapat dirancang untuk melakukan tugas apa pun yang diinginkan seperti mengelas, mencengkeram, memutar, dll., tergantung pada aplikasinya. Misalnya, lengan robot di jalur perakitan otomotif melakukan berbagai tugas seperti pengelasan dan rotasi serta penempatan suku cadang selama perakitan. Dalam beberapa keadaan, peniruan yang dekat dari tangan manusia diinginkan, seperti pada robot yang dirancang untuk melakukan pelucutan dan pembuangan bom.
Dibawah ini adalah video yang memperlihatkan perbedaan pergerakan arm robot mitsubishi dan omron pada tiap jointnya
C. Pekerjaan yang dapat dilakukan arm robot
Salah satu keuntungan utama dari lengan robot industri adalah keserbagunaannya untuk mendukung banyak aplikasi — dari yang paling sederhana hingga pekerjaan yang paling kompleks di lingkungan yang paling aman atau paling keras. Mengotomatiskan jenis tugas ini tidak hanya menghilangkan pekerja manusia dari situasi yang mungkin berbahaya, tetapi juga memungkinkan pekerja tersebut untuk melakukan tugas bernilai tinggi seperti berinteraksi dengan pelanggan.
Berikut adalah beberapa cara paling umum yang digunakan produsen menggunakan lengan robot saat ini:
- Membuat palet(palletizing)
Lengan robot dapat digunakan untuk mengotomatisasi proses penempatan barang atau produk ke palet. Dengan mengotomatiskan proses, pembuatan palet menjadi lebih akurat, hemat biaya, dan dapat diprediksi. Penggunaan lengan robot juga membebaskan pekerja manusia dari melakukan tugas-tugas yang menimbulkan risiko cedera tubuh.
- Penanganan Bahan(Material Handling)
Lengan robot penanganan material dapat membantu menciptakan gudang yang aman dan efisien dengan memastikan barang dan material disimpan dengan benar, mudah ditemukan, atau diangkut dengan benar. Mengotomatiskan proses ini dapat membantu mempercepat pengiriman barang ke pelanggan, mencegah kecelakaan kerja, dan meningkatkan efisiensi fasilitas.
- Pengelasan(Welding)
Pengelasan adalah tugas yang dapat dilakukan oleh robot dalam pengaturan industri maju seperti manufaktur otomotif. Mengingat dampak kritisnya pada kualitas produk, pengelasan adalah kandidat yang sangat baik untuk robotika canggih dengan visi dan augmentasi AI untuk pemeriksaan kualitas inline.
- Inspeksi(Inspection)
Melakukan pemeriksaan kualitas biasanya diselesaikan pada akhir jalur produksi, yang menunda deteksi masalah kualitas produksi. Dengan menyempurnakan robot dengan visi dan sistem AI, bisnis dapat memperoleh manfaat dari inspeksi waktu nyata, membantu mengurangi pemborosan dan waktu henti.
- Ambil dan letakkan(Pick and place)
Robot pick-and-place biasanya digunakan dalam manufaktur dan logistik modern. Mereka dilengkapi dengan sistem penglihatan mesin canggih untuk mengidentifikasi objek, menangkapnya, dan memindahkannya dari satu lokasi ke lokasi lain — dengan cepat dan efisien — untuk meningkatkan kecepatan produksi dan distribusi barang.
D. Tipe-tipe arm robot berdasarkan pekerjaannya
Robot Cartesian / Robot Gantry : Digunakan untuk pekerjaan pick and place, aplikasi sealant, operasi perakitan, penanganan peralatan mesin dan pengelasan busur. Ini adalah robot yang lengannya memiliki tiga sendi prismatik, yang sumbunya bertepatan dengan koordinator Cartesian.
robot kolaboratif / Cobot : Aplikasi Cobot kontras dengan aplikasi robot industri tradisional di mana robot diisolasi dari kontak manusia. Cobot memiliki berbagai macam aplikasi seperti: Aplikasi Komersial, Riset Robotik, Pengeluaran, Penanganan Material, Perakitan, Penyelesaian, Pemeriksaan Kualitas. Keamanan Cobot mungkin bergantung pada bahan konstruksi yang ringan, tepi yang membulat, dan keterbatasan kecepatan dan kekuatan yang melekat, atau pada sensor dan perangkat lunak yang memastikan perilaku aman.
Robot silinder : Digunakan untuk operasi perakitan, penanganan pada peralatan mesin, pengelasan titik, dan penanganan pada mesin die casting. Ini adalah robot yang sumbunya membentuk sistem koordinat silinder.
Robot bulat / Robot kutub : Digunakan untuk menangani peralatan mesin, pengelasan titik, die casting, mesin fettling, pengelasan gas dan pengelasan busur. Ini adalah robot yang sumbunya membentuk sistem koordinat kutub.
Robot SCARA : Digunakan untuk pekerjaan pick and place, aplikasi sealant, operasi perakitan dan penanganan peralatan mesin. Robot ini memiliki dua sambungan putar paralel untuk memberikan kepatuhan di pesawat.
Robot artikulasi : Digunakan untuk operasi perakitan, diecasting, mesin fettling, pengelasan gas, pengelasan busur, dan pengecatan semprot. Ini adalah robot yang lengannya memiliki setidaknya tiga sambungan putar.
Robot paralel : Salah satu kegunaannya adalah platform seluler yang menangani simulator penerbangan kokpit. Ini adalah robot yang lengannya memiliki sambungan prismatik atau putar bersamaan.
Robot antropomorfik : Dibentuk sedemikian rupa sehingga menyerupai tangan manusia, yaitu dengan jari dan ibu jari yang mandiri.
Terakhir diubah: Senin, 14 November 2022, 05:16
